定义 AI 智能体:从“问答模式”转向“交付模式”
AI 智能体(AI Agent)是将大模型的“预测能力”转化为“执行能力”的软件实体。
它与传统 AI 聊天机器人的核心区别在于:后者是基于对话的“问答模式”,而前者是基于目标的“交付模式”。进入 2026 年,AI 智能体的竞争重心已从提示词工程转向对环境控制权的争夺。
真正的智能体必须具备自主规划(Planning)和自我修正(Self-correction)能力。如果系统只能按 A -> B -> C 的预设路径运行,它本质上仍是一个复杂脚本,而非智能体。一个可运行的智能体由三部分构成:由 LLM 提供的推理大脑、通过 API 或传感器获取数据的感知系统,以及通过 Tool Use 调用外部工具的行动端。
构建核心逻辑:规划-执行-反思的闭环
构建实用智能体最有效的路径是“规划-执行-反思”循环。
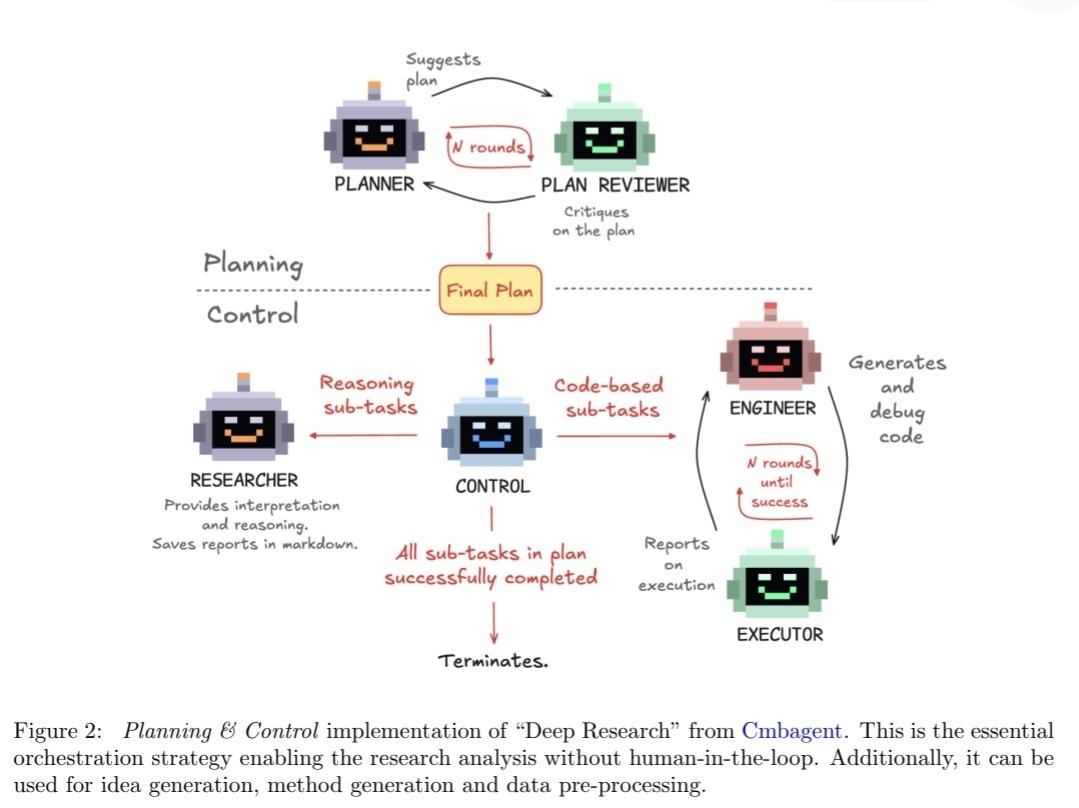
开发者应停止尝试用单一的长提示词解决所有问题,而应将任务拆解为可观测的状态机。智能体在每步操作后必须验证结果,若不符合预期则需重新规划路径,而非机械地执行下一步。这种机制有效地解决了多智能体协作中常见的通信冗余和循环死锁问题。
主流构建工具对比分析
| 工具/框架 | 核心优势 | 局限性 | 适用场景 |
|---|---|---|---|
| CrewAI | 低代码门槛,角色定义清晰 | 复杂逻辑下难以精准控制 | 快速原型验证 |
| Rust-based Frameworks | 高并发,内存安全,确定性强 | 学习曲线陡峭 | 底层架构,实时感知任务 |
| n8n (低代码) | 部署极快,可视化强 | 限制了自主决策空间 | 简单自动化工作流 |
| LangGraph | 支持有状态图结构,允许回溯 | 需要较强的 Python 编程能力 | 复杂企业级 Agent 构建 |
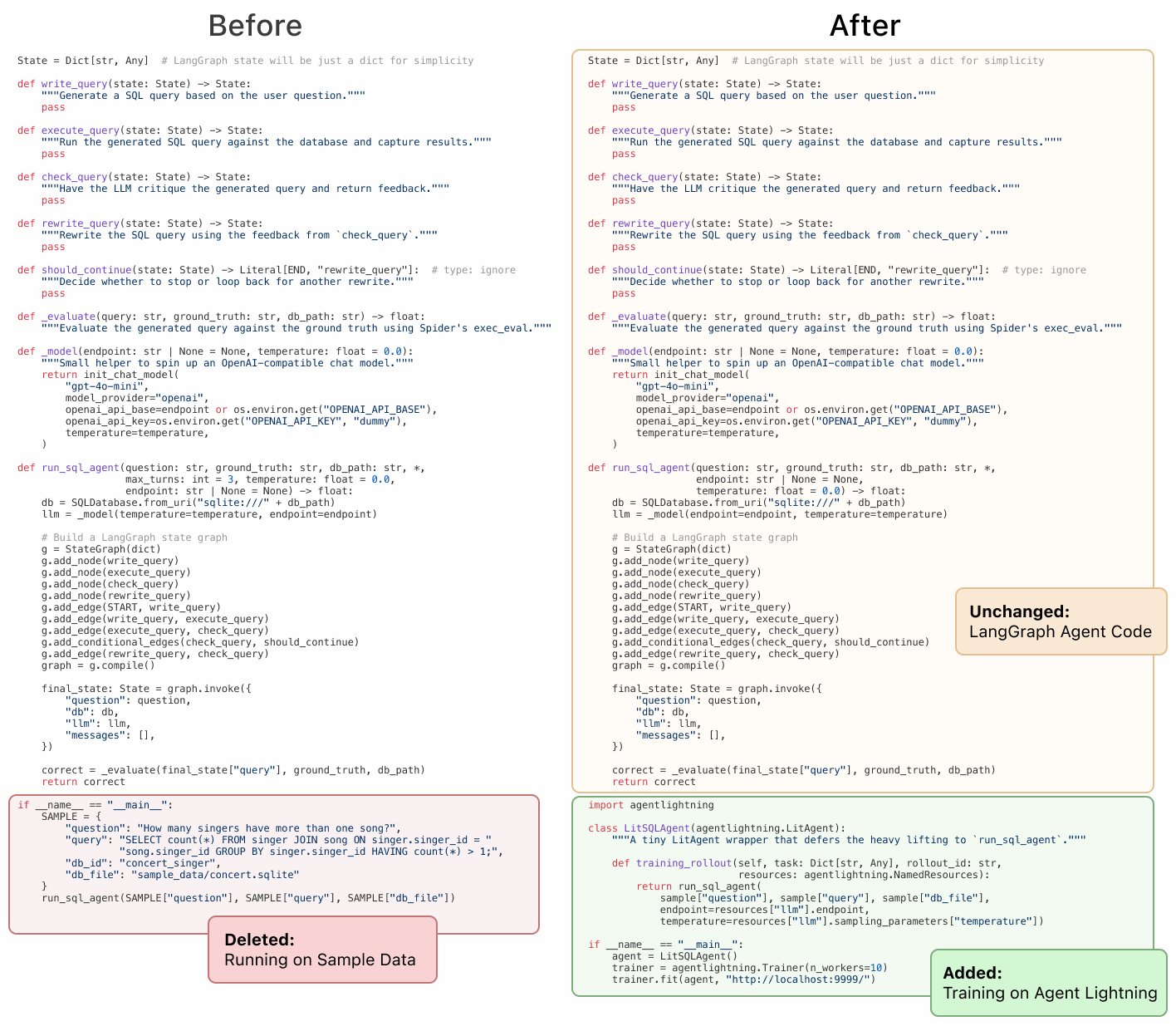
实操指南:使用 Python + LangGraph 构建智能体
通过构建有状态的图结构,允许智能体在执行中跳转回前一状态进行修正。
安装 langgraph 和 langchain-openai,建议使用 Python 3.12+。创建 State 类并定义 TypedDict,包含 messages 和 current_plan。注意:LangGraph 的状态更新是增量式的,若要覆盖字段必须指定 reducer 函数。
将用户目标拆解为 JSON 格式的步骤数组。将 temperature 设置为 0 或 0.1 以保证稳定性,并接入 Pydantic 验证层,确保输出结构化。
使用 @tool 装饰器封装接口。建议在调用外层包裹指数退避(Exponential Backoff)重试逻辑,并设置最大调用次数(如 10 次)以防止死循环。
在执行节点后接入验证节点,将结果发回 LLM 审视是否足以回答问题。若不足,状态指针将导回规划节点并更新失败路径。

适用场景与局限性分析
AI 智能体并非万能,在某些特定场景下,传统算法或简单脚本更可靠:
- 极高实时性场景: 如自动驾驶刹车或高频交易,需要确定性算法而非随机性推理。
- 简单固定任务: 如定时发送天气预报,使用 Cron Job 即可,可降低 Token 成本。
- 高风险写权限操作: 如生产环境数据库删除,必须建立 Human-in-the-loop 确认机制。
问:多智能体架构(Multi-Agent)是否总是优于单体智能体?
答:并非如此。虽然多智能体在理论上能分工协作,但在实际生产中,由于通信冗余和潜在的循环死锁,其效率往往低于一个经过精细调优的单体智能体。建议优先强化单体的规划与反思能力。
问:如何防止 Agent 在执行过程中陷入死循环?
答:最有效的两种方法是:一是设置硬性的最大迭代次数(Max Iterations);二是引入验证节点,通过 LLM 判定当前路径是否在原地打转,并在状态中记录已尝试失败的路径。
总结:目前的演进方向是“受控的自主”。与其追求多智能体架构的复杂感,不如优先强化单体智能体的规划与反思能力。建议开发者先用 Python 编写一个带有反思循环的单体 Agent,解决一个具体业务痛点,而非在低代码平台上搭建无法掌控的流程图。